ROS - RC ve İHA Programlama
Yaygın olarak araştırma, endüstriyel ve eğitim alanlarında kullanılan ROS (Robot Operating System), temelde bir işletim sistemi olarak adlandırılmasına rağmen robot sistemlerinin kontrolü, sensör verilerinin işlenmesi, navigasyon, yapay zeka entegrasyonu ve daha birçok işlevi kolaylaştırmaktadır. Tüm bunları ise çeşitli araçlar ile kullanıcılarına sunar. ROS robotik sistemlerin geliştirilmesi ve kontrol edilmesi için açık kaynaklı bir yazılım platformudur. İHA (İnsansız Hava Aracı) programlaması için ROS kullanımı, hava araçlarının otonom uçuş yeteneklerini geliştirmek için yaygın olarak tercih edilen bir yöntemdir.
ROS, modüler yapısı sayesinde farklı bileşenleri bir araya getirerek karmaşık robot sistemlerinin oluşturulmasını sağlamaktadır. RC ise bir nevi uzaktan kumanda vazifesi görmektedir. İnsansız hava araçlarında mesela drone gibi kullanıcıların İHA’ların hareketlerini, rotalarını ve diğer parametrelerini uzaktan kontrol etmelerini sağlamaktadır. Geleneksel olarak, bir pilot veya operatör, bir uzaktan kumanda cihazı aracılığıyla İHA’yı manuel olarak kontrol etmektedir. Ancak, gelişen teknoloji ile modern İHA’lar genellikle otonom uçuş yeteneklerine sahiptirler. Bunun içinde belirli görevleri veya rotaları otomatik olarak gerçekleştirebilmektedirler.

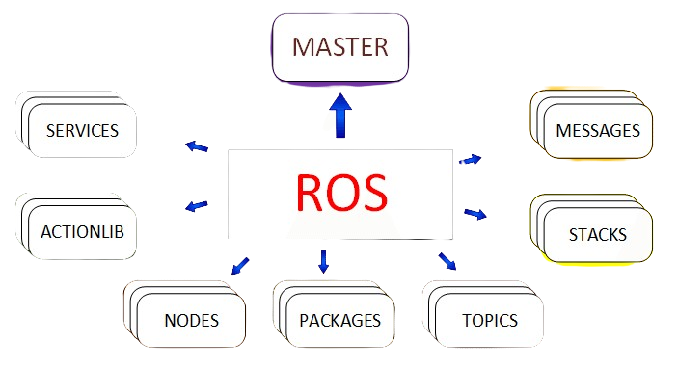
ROS, robotik uygulamaları geliştirmek için bir dizi araç ve bilgi içeren açık kaynaklı bir yazılım platformudur. Modüler yapısı sayesinde, farklı bileşenleri bir araya getirerek karmaşık robotik sistemler oluşturmak mümkündür. ROS, iletişim, sensör verileri işleme, hareket kontrolü, navigasyon ve görselleştirme gibi bir dizi temel işlevi sağlamaktadır. ROS, İHA’ların otonom uçuş yeteneklerini geliştirmek için oldukça güçlü bir araç olmaktadır. İHA’lar genellikle çeşitli sensörlerle donatılmıştır. Uçuşlarda bu sensörlerden gelen verilerin işlenmesi ve uçuş kararlarının alınması gerekmektedir. Tamda bu işlemler için ROS yazılımı devreye girmektedir. ROS, sensör verilerini işlemek, haritalama ve konumlandırma yapmak, yol planlama ve uçuş kontrolü gibi görevler için donatılmış ve geliştirilmiş bir uygulamadır. ROS’un İHA programlamasında farklı birçok arayüzü ve aracı bulunmaktadır. Bunlar çeşitli işlemler için gerekli olmaktadır. ROS’un İHA programlamasındaki rolleri ise şu şekilde özetlenebilir; Veri Entegrasyonu: ROS, İHA’ların çeşitli sensörlerinden gelen verileri tek bir sistemde birleştirmek için kullanılır. Bu, uçuş kararları almak için gerekli olan kapsamlı bir veri setinin elde edilmesini sağlar. Uçuş Kontrolü: ROS, İHA’ların stabilizasyonunu sağlamak ve belirli bir rotaya veya noktaya uçmasını sağlamak için kullanılır. PID kontrolcülerinden, daha karmaşık kontrol algoritmalarına kadar çeşitli kontrol stratejileri ROS üzerinde uygulanabilir. Yol Planlama: İHA’ların belirli bir hedefe veya bölgeye güvenli bir şekilde uçması için ROS, çeşitli yol planlama algoritmalarını sağlar. Bu, engelleri önlemek ve güvenli bir uçuş yolu oluşturmak için kullanılır. Simülasyon: ROS, İHA’ların gerçek dünya uygulamalarından önce simülasyonlarında kullanılabilir. Bu, geliştirme sürecini hızlandırır ve maliyetleri azaltır.
Drone endüstrisi oldukça hızlı bir şekilde gelişmektedir. İnsansız hava araçlarındaki ihtiyaçta her geçen gün bu minvalde artmaktadır. Bu kapsamda ROS’un İHA programlamasındaki rolü, hızla gelişen drone endüstrisinde giderek daha önemli hale gelmektedir. Gelecekte, ROS’un İHA’ların daha karmaşık görevleri gerçekleştirmesi için daha da geliştirilmesi ve iyileştirilmesi beklenmektedir. Birçok yazılım teknolojisinin geleceğinde beklendiği gibi yapay zeka, makine öğrenimi ve derin öğrenme gibi alanların ROS ile entegrasyonu, İHA’ların daha akıllı ve etkili hale gelmesini sağlayabilecek unsurlar arasında yer almaktadır. Bu teknolojik gelişimler ve güncellemeler ile İHA’lar birçok farklı endüstriyel ve ticari uygulamada daha yaygın bir şekilde kullanılabilir hale gelebilecektir. Gelişimini ve kullanım alanlarını arttıran İHA’ların ROS ile programlanması ise gelecek dönemlerde oldukça büyük öneme sahip gelişimler arasında yer alacaktır.